Wearable Balancing Aid
Outer Ear is a novel wearable haptic feedback device for individuals with impaired balance that I developed as part of a multi-disciplinary senior design project team.

Quick project summary:
Step 1: Initial research and planning
Step 2: Design ideation
Step 3: Secondary research
Step 4: Developing prototype
Step 5: Design verification
Technical skills employed:
Project Management: Planning and facilitating meetings, task delegation, project timeline management, defining design scope of work, writing milestone reports
Design: Human-centered design philosophy, design testing and validation
Prototyping: Soldering, Sewing, 3D printing
Programming: Python, C++, Mbed Studio, GitHub

I undertook this design project as part of a 4-person interdisciplinary design team, working alongside Dana Choy (biomedical engineering), Ben Presley (mechanical engineering), and Connor Sexton (electrical engineering). Our sponsor was a medical device inventor who worked extensively with individuals with impaired senses of balance or body position, also known as proprioception. He tasked us with developing a novel device that could not only serve as a robust balancing aid but also be used as a training implement to help with the process of developing alternate feedback loops for proprioception through neuroplasticity, or “the ability of the nervous system to change its activity in response to intrinsic or extrinsic stimuli by reorganizing its structure, functions, or connections after injuries” (NIH.gov).
After our initial discussions with our sponsor, we got to work researching the fundamentals of proprioception and neuroplasticity and began defining our project scope and design criteria. Our initial research also involved looking into existing devices to determine where unmet clinical needs might be present. We decided to limit our scope to helping stroke patients improve steadiness while standing and walking. We determined that our design should be lightweight, untethered, and comfortable, provide sensory feedback to help retrain neural pathways, be easily adjustable to different body types and sizes, and be safe for users in the event that they fall.
We also spent considerable time planning our project in the beginning phase. We developed a Gantt chart to map our expected progress across the school year, along with a QFD matrix to define specific design criteria based on our sponsor interviews.


After completing the initial research and project planning phase, we jumped straight into the conceptual design process. We used ideation techniques like braindumping, mind mapping, and reverse brainstorming to generate as many solutions as possible. Since our main interest was fostering creativity at this stage, we refrained from critiquing any ideas based on feasibility. It was also in this phase that we came up with the name “Outer Ear” to signify that our device’s main function should be to provide a sense of physical self-awareness, just like one’s own inner ear.
Once we had a large and varied list, we began to combine and compare solutions based on feasibility and design criteria using techniques like attribute listing, comparing pros and cons, and creating criteria matrices. When our list was finally narrowed down to five of our most viable solutions, we created sketches, physical mock-ups, and back-of-the envelope calculations to determine our final conceptual solution. Eventually, we combined our top two ideas into a wearable vest with two reaction wheels and two haptic motors. The reaction wheels were intended to provide physical assistance in maintaining an upright posture while the haptic motors were intended to provide the sensory feedback for training alternate proprioceptive pathways.
We finished the conceptual design process by analyzing the feasibility, functionality, and safety of our design. I modeled the dynamics of our reaction wheels on an inverted pendulum while my teammates, Connor and Ben, calculated the power requirements for our system and programmed a mock control algorithm. Finally, we combined this analysis in a conceptual design report and presented it to our advisors and sponsor.

The critical design phase of this project was the most difficult for our team. We began by digging into the detailed aspects of our conceptual design, including more accurate mechanical and electrical analysis and hardware specification and procurement. The more work we did, the clearer it became that our design was not going to be feasible with the resources available to us. For the maximum height and weight specified in our design, the motors required to keep a person upright needed more power than we could reasonably provide. What’s more, our team became increasingly concerned that the reaction wheels would not meet our sponsor’s safety requirements in the event of a fall. Rather than continue to pursue our initial concept for our device, we decided to bring our concerns to our sponsor and advisor while there was still time to adjust our plans.
After reassessing the importance of training neuroplasticity over providing physical stabilization to the wearer, together with our sponsor we made the difficult decision to remove the reaction wheel aspect from our design. This allowed us to focus on expanding and refining the haptic motor array, which were intended to develop alternate proprioceptive feedback loops. Besides addressing our main concerns around power and safety, this reduction in scope also meant that our design was more lightweight, comfortable, and adjustable. In the end, looking critically at our ideas and removing unproductive aspects led us to a design that better met our potential users’ needs.

We moved on to developing the functional prototype soon after finalizing our critical design. Each member of the team took on a leadership role in developing a major aspect of the device. I led the development of the wearable garment, Dana the controls housing, Connor the electronics and circuitry, and Ben the programming.
Building our final functional prototype was not a straightforward process and involved a lot of iteration. As we developed the fully functioning prototype, we experimented with design aspects like velcro configurations on the garment, IMU and battery placement in the housing, and motor strength and responsiveness in the control algorithm. We had particular difficulty finding the right microcontroller for our system, and had to iterate through several versions of the control algorithm in both C++ and Python.
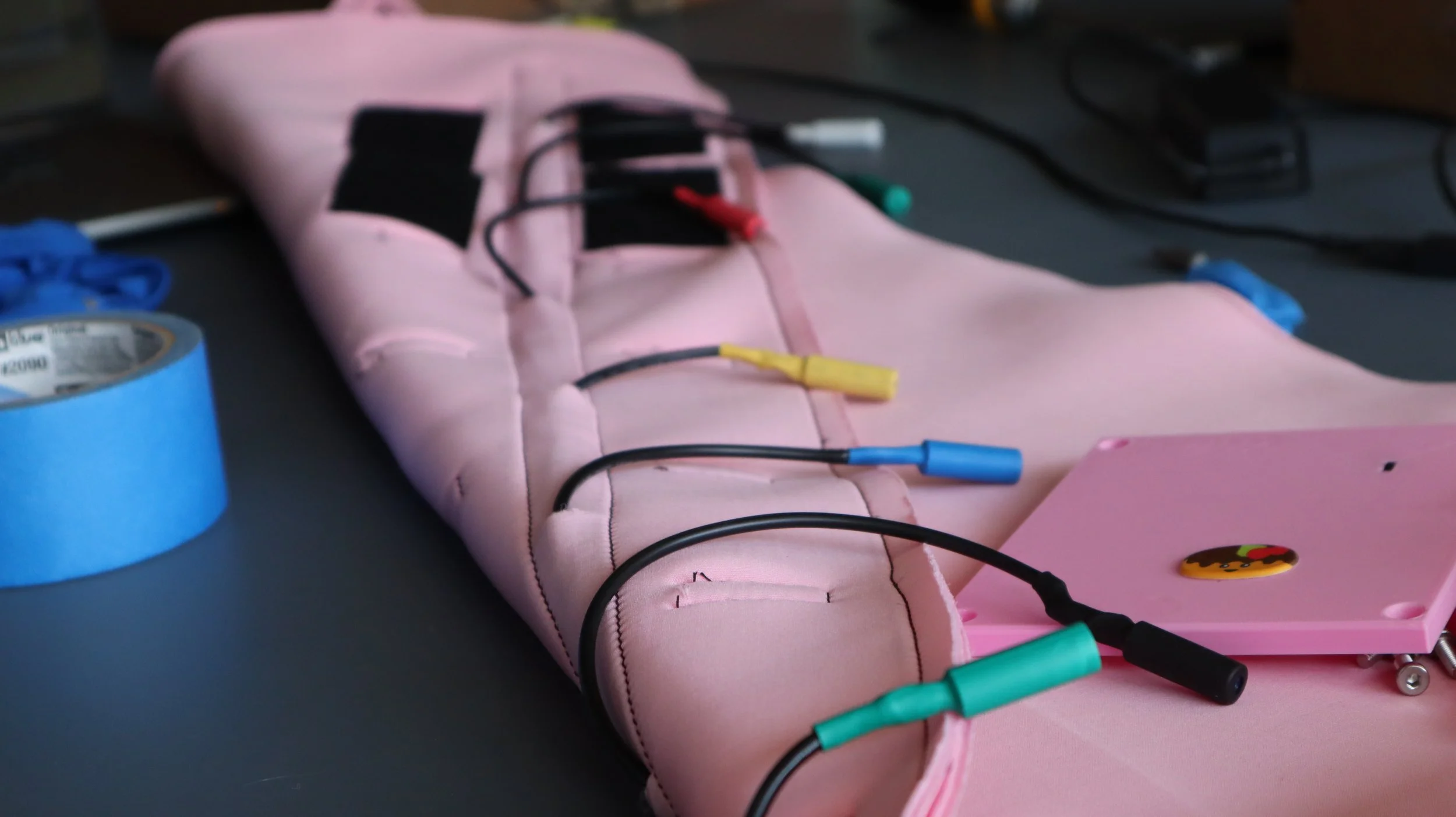
Creating the wearable garment had particular user-interaction design challenges that other aspects of the device did not. It had to be comfortable, accommodate a wide variety of body types and sizes, and had to allow for relocation of motors to evenly spaced locations on the abdomen. I ended up sewing a double-layered sash out of neoprene with two rows of motor pockets and a cable channel.

We began design verification testing upon completion of our functional prototype. Led by our biomedical engineer, Dana, we came up with a series of tests to determine if our device actually met our goals and requirements using the validation criteria identified during the initial planning phase of our project.
Because of the coronavirus pandemic restrictions at the time, we were unable to meet with any of our sponsor’s clients for direct testing. As a result, we had to get creative, so we conducted tests on ourselves after simulating the symptoms of impaired proprioception. We found evidence suggesting that “elephant spins,” a technique involving spinning rapidly with one arm outstretched, could induce the symptoms of vertigo — a common proprioceptive impairment.
Each group member participated in a series of standing tests in which the angle of body lean was recorded once before turning on the device, again directly after turning on the device, and finally after having worn the device for 5 minutes. Each of us also participated in a 5-step dynamic gait index assessment before and after inducing vertigo.
Our test results before and after inducing vertigo were not statistically different, so our final results were inconclusive. As a result, we determined that inducing vertigo was not an effective method to impair our sense of proprioception. However, our testing was useful in determining qualitative feedback, and we identified several improvements that we would have made in the next round of prototyping. These include increasing motor count, placing motors closer to the wearer’s skin, adding gain control for the motors, and increasing tilt sensitivity.
-
![]()
Sewing the Wearable Garment
-
![]()
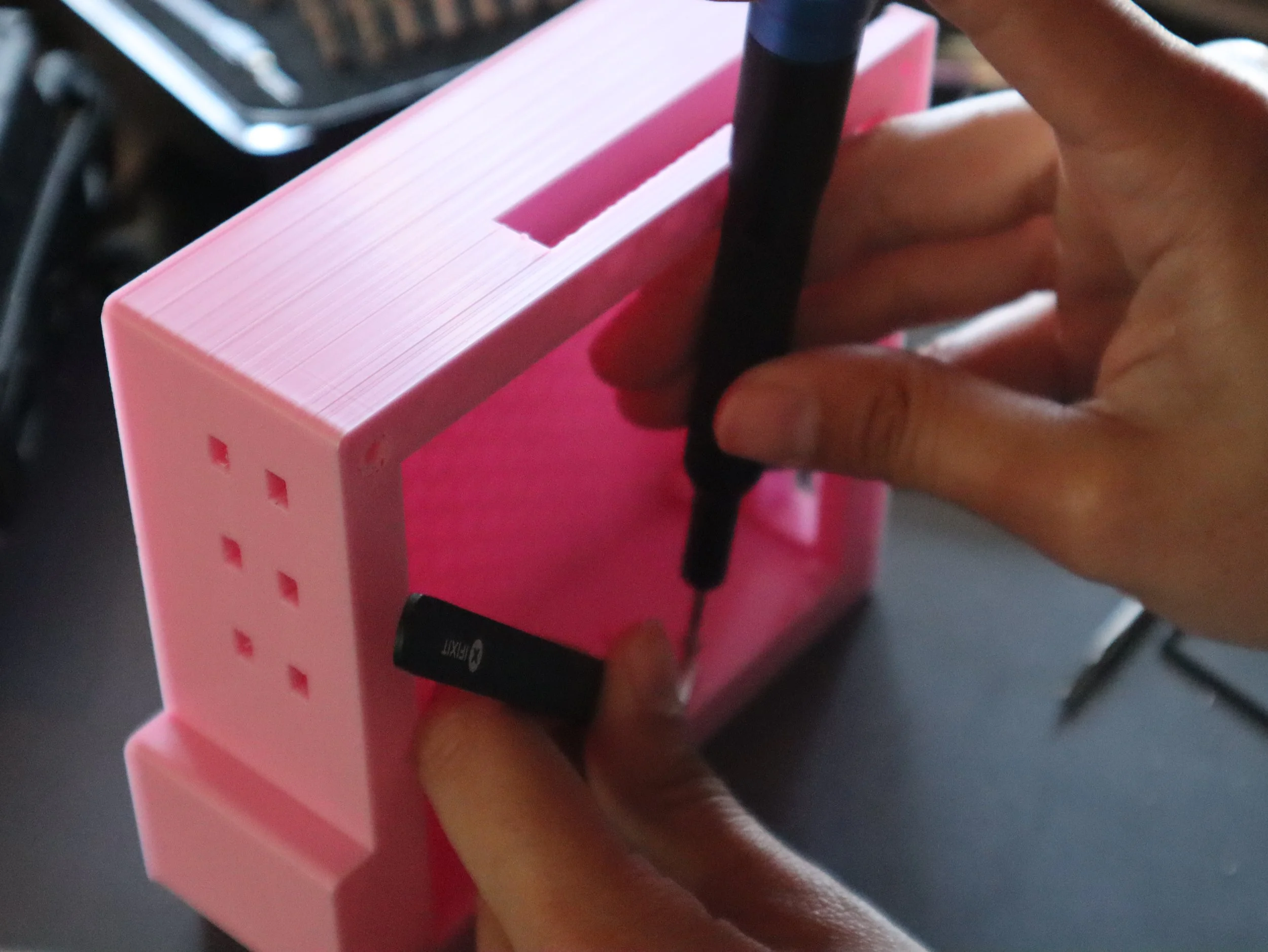
One iteration of the main housing
-
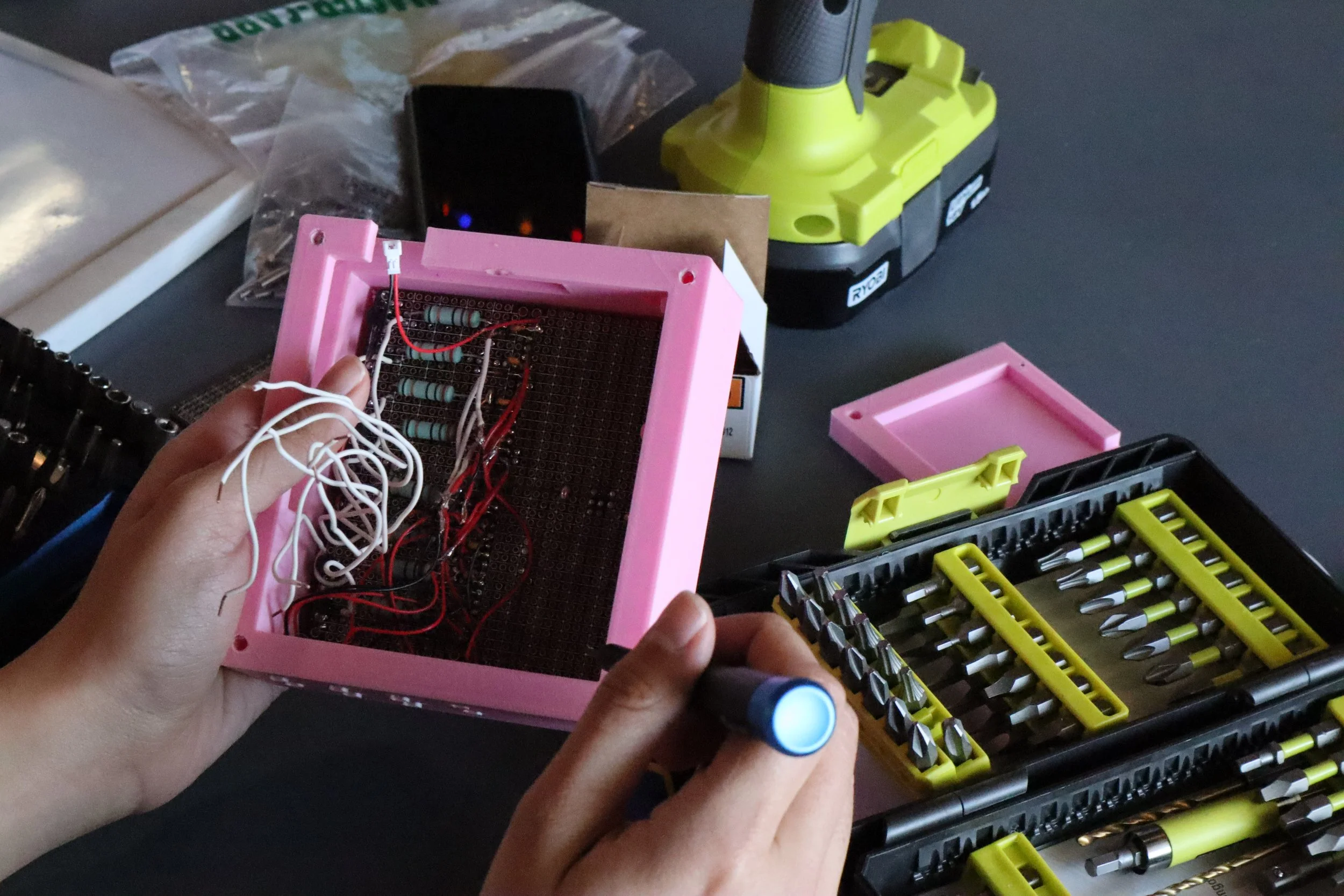
![]()
Developing the electronics
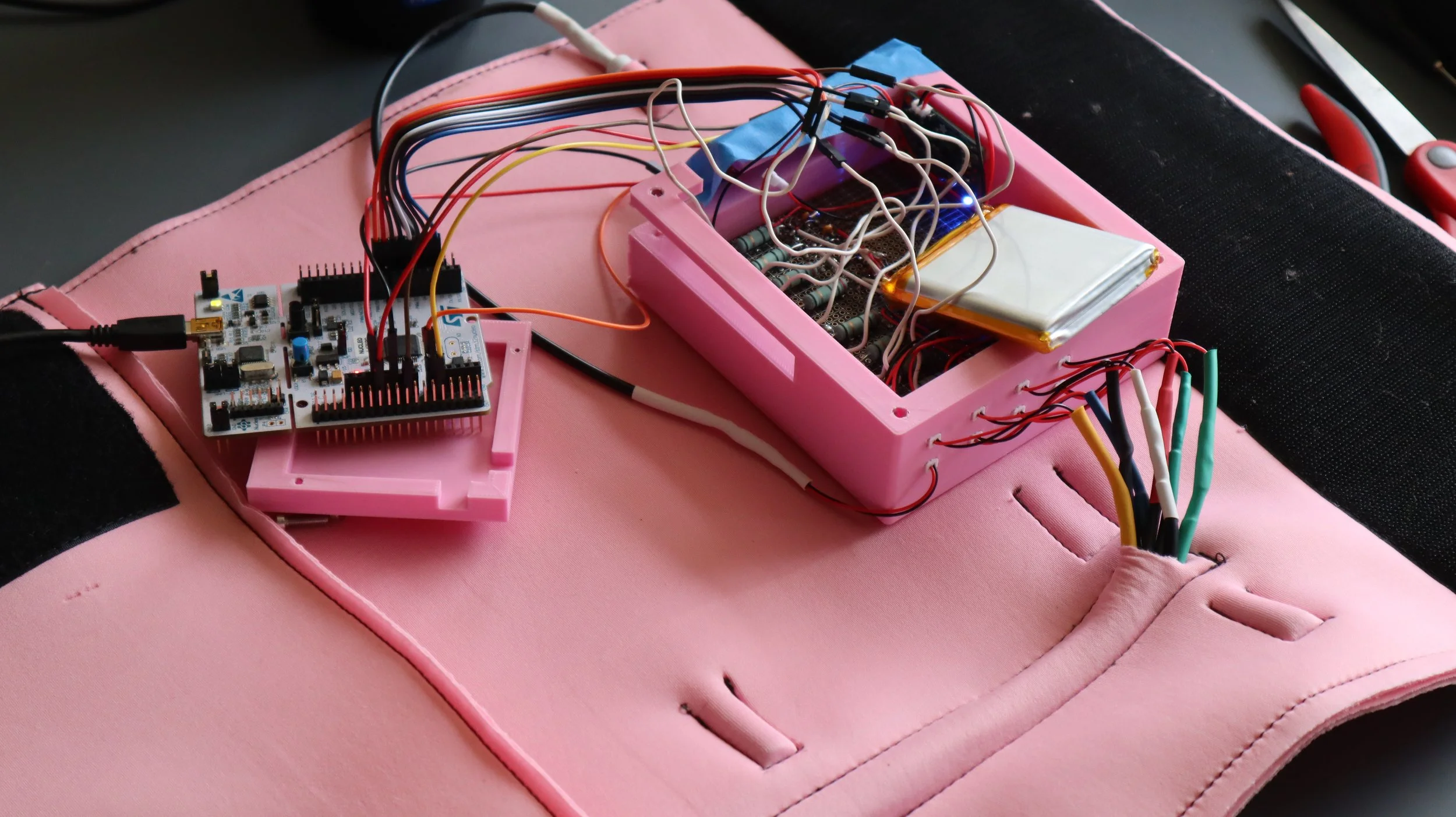
-
![]()
Testing the electronics
-
![]()
Mounting the electronics housing
-
![]()
Adding in the haptic motors
-
![]()
The completed prototype