
Nitinol Animatronic Eye
This Animatronic Eye Mechanism uses nitinol shape memory wires for simple and silent actuation. I developed a novel PCB to enable precise control and self-sensing feedback for each wire’s position. 3D-printing the mechanism's components has allowed for quick iterative prototyping.
Quick project summary:
Step 1: Defining the project scope and goals
Step 2: Nitinol background research
Step 3: Developing the nitinol driver PCB
Nitinol driver PCB Demos
Step 4: Iteratively prototyping the eyeball mechanism
Mechanism Demo
Technical skills employed:
Hardware: Flexinol SMA wire, custom-designed nitinol control PCB, Adafruit PCA9685 PWM breakout, Adafruit ADS1015 ADC breakout, Adafruit Metro Mini
Electronics: Circuit analysis and simulation, Component selection, oscilloscope testing and troubleshooting
Prototyping: SMT reflow soldering, electronics component selection, PCB design and procurement, Design for 3D printing & assembly
CAD: AutoDesk Fusion 360 - parametric modeling, assembly modeling, circuit diagrams, PCB modeling

Fig 1. The cheap servos used in my previous animatronic mask were much too noisy and undermined the overall illusion.
Defining project scope and goals:
I had a ton of fun creating my first animatronic mask a few years ago and have wanted to build a more advanced version. The biggest challenge has been finding affordable, silent servo motors, as the mechanical whir of even the most high-end servos undermines the illusion of animatronics when up close.
I aim to create truly silent animatronics that don’t require expensive components. I’ve decided to start with an eyeball since it’s a natural addition to my mask project and requires 3-dimensional rotational motion, making it an interesting challenge.
I have defined the scope of this design as follows:
Mechanical actuation is inaudible at close proximity (~1 ft)
Costs less than $25 USD for actuator and mechanism components (estimated based on portions of materials used)
Minimum +/- 35 degrees of motion up/down and left/right
Can be powered using commonly available batteries or power supplies
Designed with ease of assembly and maintenance in mind

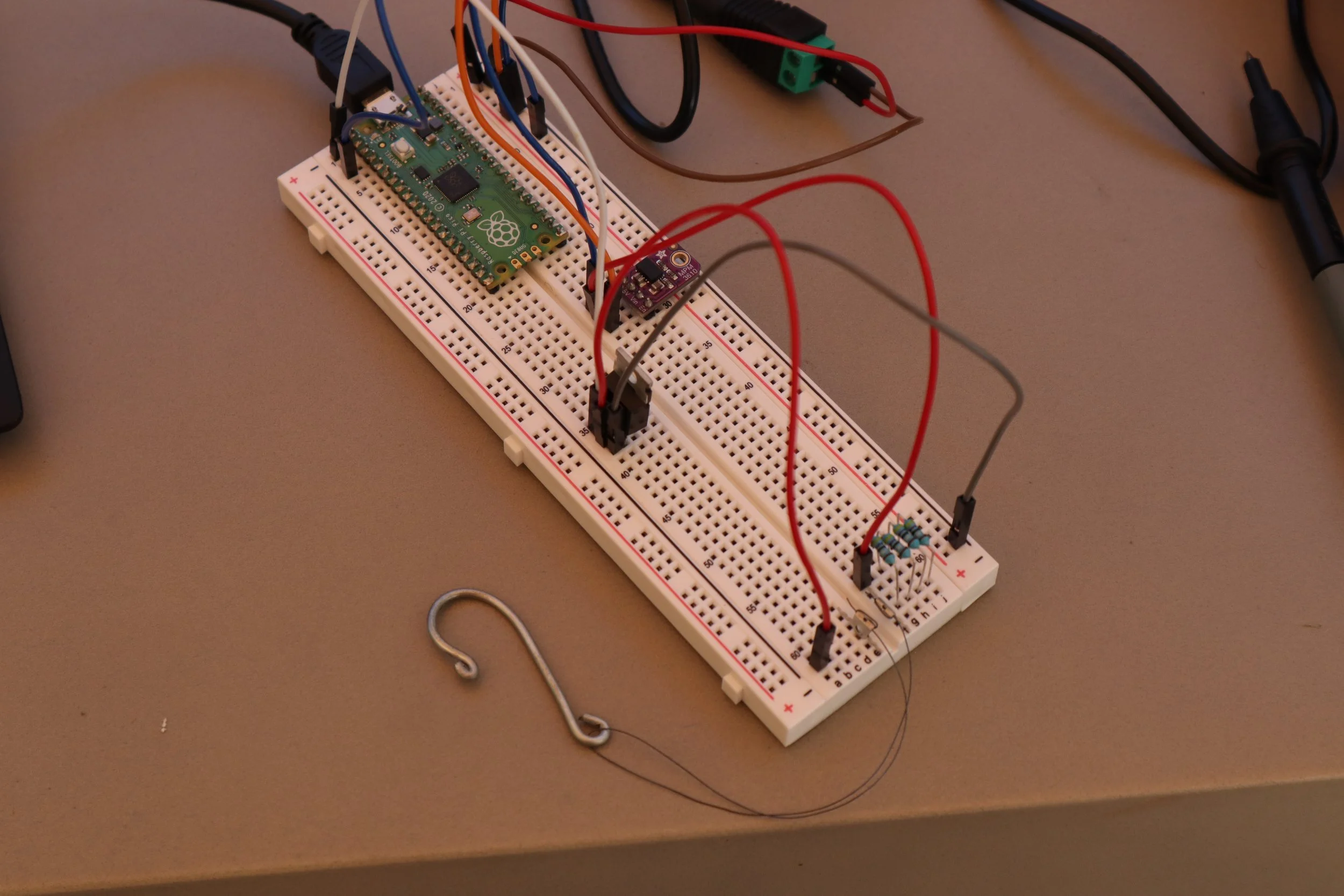
Fig 2. This snapshot shows an early iteration of my test setup. I’m using v1.0 of the nitinol control PCB with two opposing wires.
Nitinol background research:
To begin the process of designing the system for controlling my nitinol actuators, I scoured the internet for information on nitinol’s capabilities and applications, including existing control circuits. I gathered the following information:
Nitinol is a 50% nickel, 50% titanium shape memory alloy. It is flexible at low temperatures when in its martensitic phase (characterized by a more easily deformed crystalline structure). At higher temperatures, the alloy converts to its austenitic phase (rigid, compact crystalline structure), causing it to “remember” and return to a predefined shape.
Commonly used as an actuator in wire form, with 3%-5% axial deflection.
Control circuits heat nitinol wire by passing a current through it, requiring a reliable, constant current source to ensure the wire is not damaged.
PWM signals control wire length proportional to duty cycle and facilitate quicker, more consistent heating.
Actuation time depends on heating/cooling speed, sometimes resulting in considerable hysteresis. Using opposing wires reduces hysteresis for finer control.
Nitinol wire resistance is proportional to length, wire radius, and material phase. If measured accurately, it can provide positional feedback.
Based on this information, existing research projects, and the few nitinol-based products available online, I developed a novel nitinol driver PCB that integrates PWM control and self-sensing position feedback. This PCB is inexpensive (~$6.23; for details, see the BOM linked in the project summary) and uniquely well-suited for interfacing with hobby development boards like Arduino and Raspberry Pi, making it accessible to regular folks.
Developing the nitinol driver PCB
-
![Breadboard Mockup]()
Breadboard Mockup
I first constructed this rough mockup of the nitinol control circuit using electronics components that I had on hand. This was mostly a proof of concept, and was definitely not optimized.
-
![Perfboard Prototype]()
Perfboard Prototype
Once I felt confident that the circuit could work, I started locking in design variables, such as actuation voltage and nitinol wire length. I then sourced the necessary components for a more permanent prototype online, and soldered it together on perfboard. After testing and validating this more robust version, I moved on to modeling the circuit using Fusion 360.
-
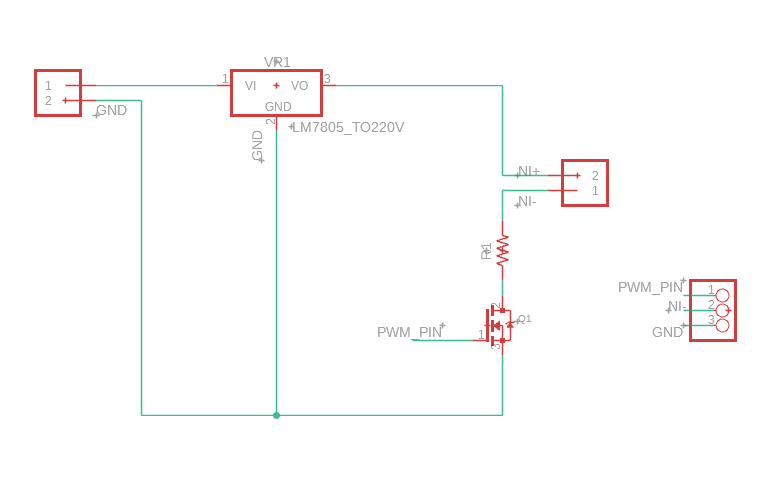
![PCB v1.0 Schematic]()
PCB v1.0 Schematic
Using Fusion 360's ECAD features, I was able to develop a PCB of my custom circuit. I began by selecting my components and defining the electrical schematic.
-
![PCB v1.0 Layout]()
PCB v1.0 Layout
After defining the schematic, I moved on to the PCB layout, including component placement, defining traces and ground fills, and silkscreen text.
-
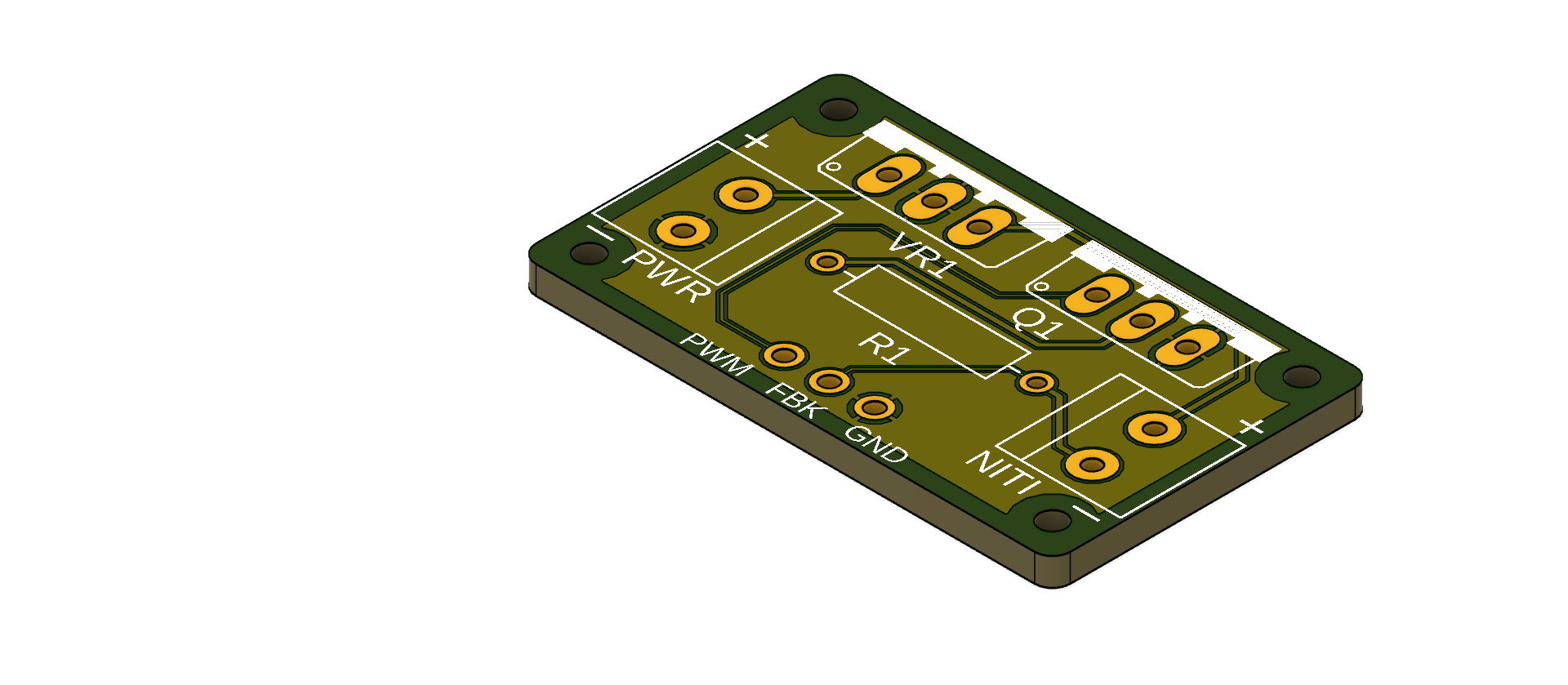
![PCB v1.0 Model]()
PCB v1.0 Model
Although not strictly necessary, I also created a CAD model of my PCB in case I ever want to integrate it into a larger assembly project.
-
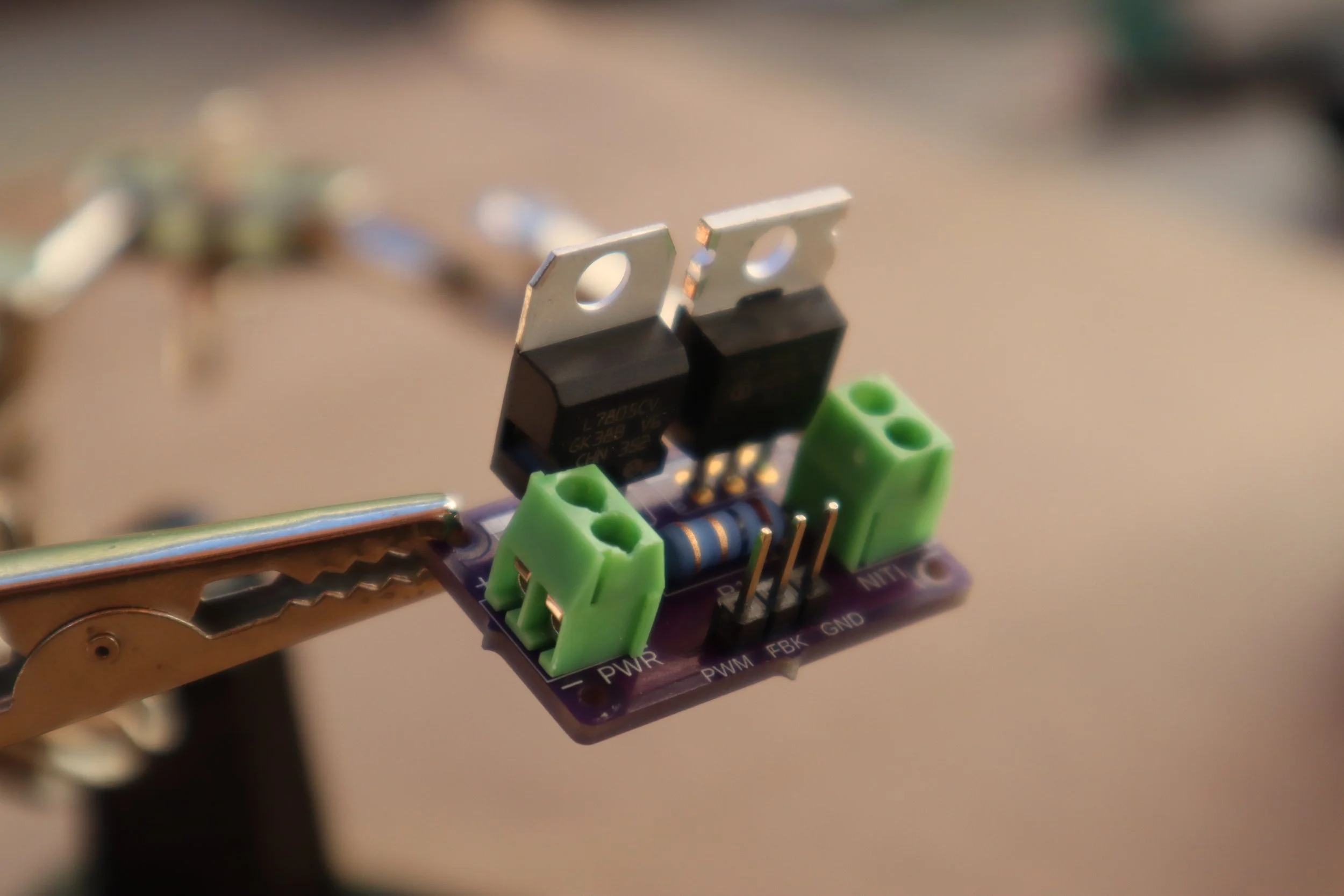
![PCB v1.0 Prototype]()
PCB v1.0 Prototype
Once I confirmed that my PCB design conformed to the design rule checks (DRC) of my chosen fabrication service, I sent off my files. A few weeks later, I received a set of manufactured PCBs. After integrating and testing the nitinol actuator, I concluded that the position feedback signal needed significant refinement to be useful for closed-loop control.
-
![PCB v2.0 Layout]()
PCB v2.0 Layout
I updated my circuit to include additional components to refine the position feedback signal. While I was at it, I also converted the existing components to SMT (surface mount) versions to increase the compactness of the design - except the resistor R1, which I want to be able to easily desolder and swap for different values to accommodate different lengths of nitinol wire. In addition to the PWM input and position feedback output, it also features a small potentiometer that can be used to adjust the “zero” value of the position feedback signal.
-
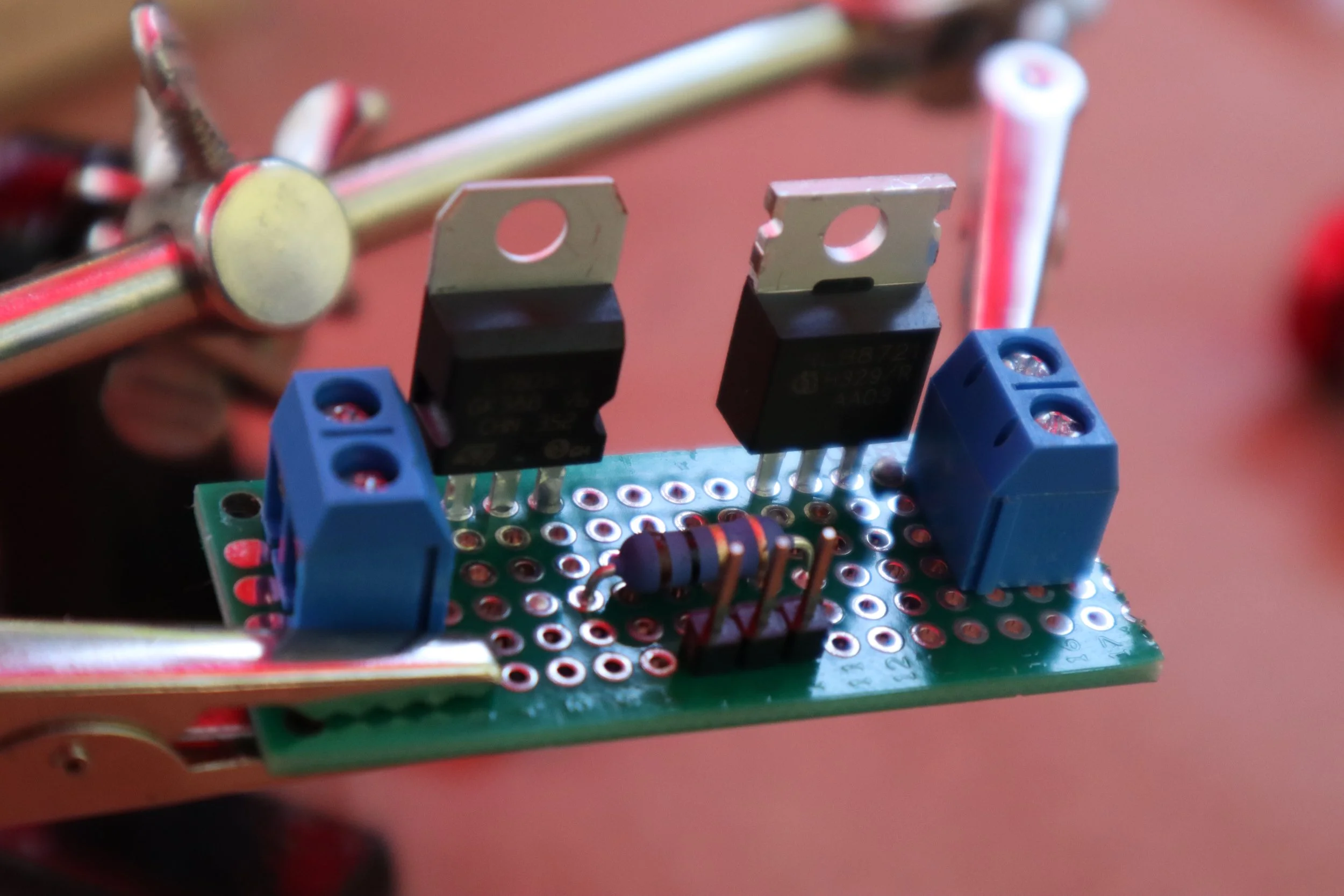
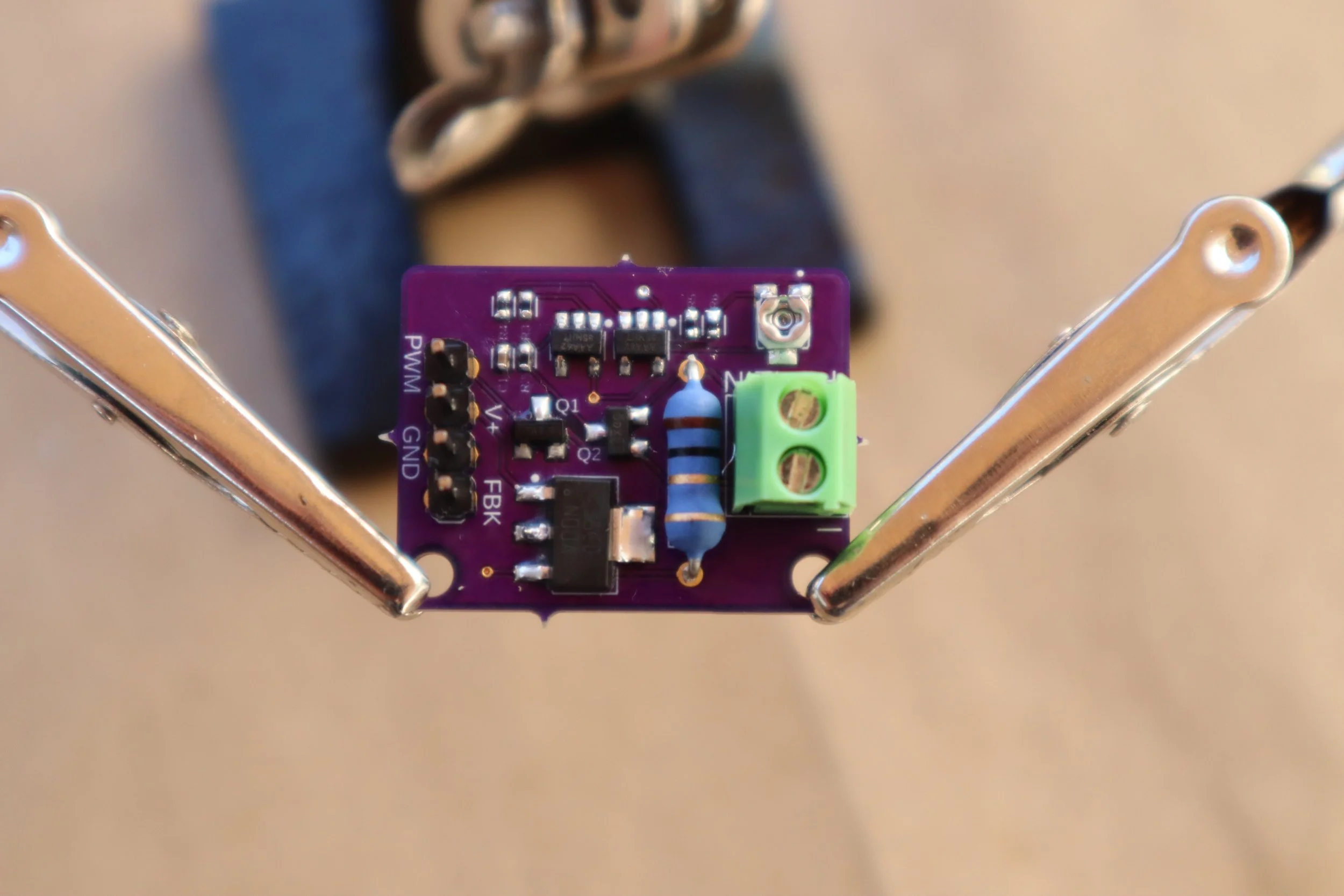
![PCB v2.0 Prototype]()
PCB v2.0 Prototype
After testing my updated PCB prototype, I've seen remarkable improvements in the position feedback signal. I also discovered some areas that needed more fine-tuning, as shown in my v2.2 PCB layout.
-
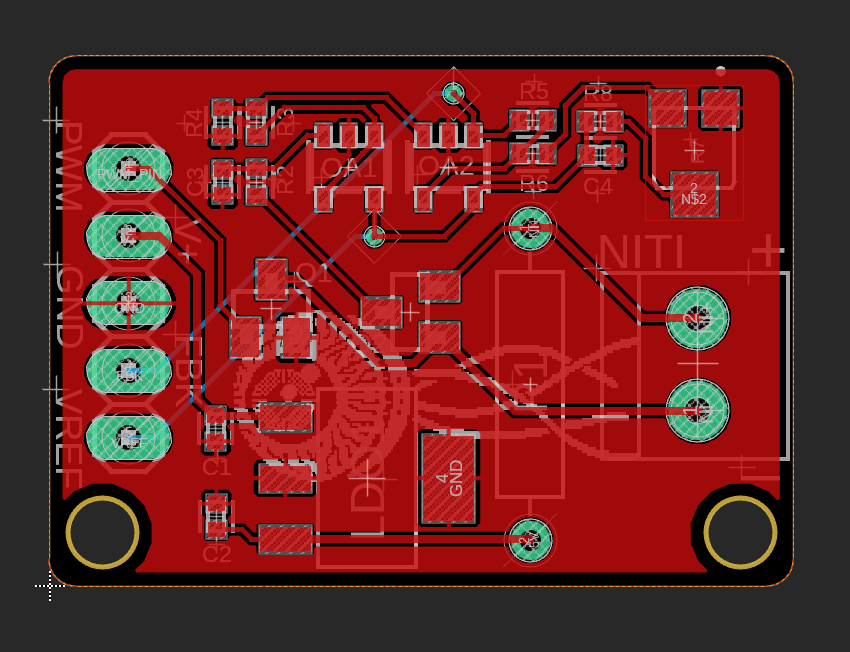
![PCB v2.2 Layout]()
PCB v2.2 Layout
In the most recent iteration of my design, I added a new input pin for an external reference voltage and some more components to smooth out the linear voltage regulator and feedback signal.
-
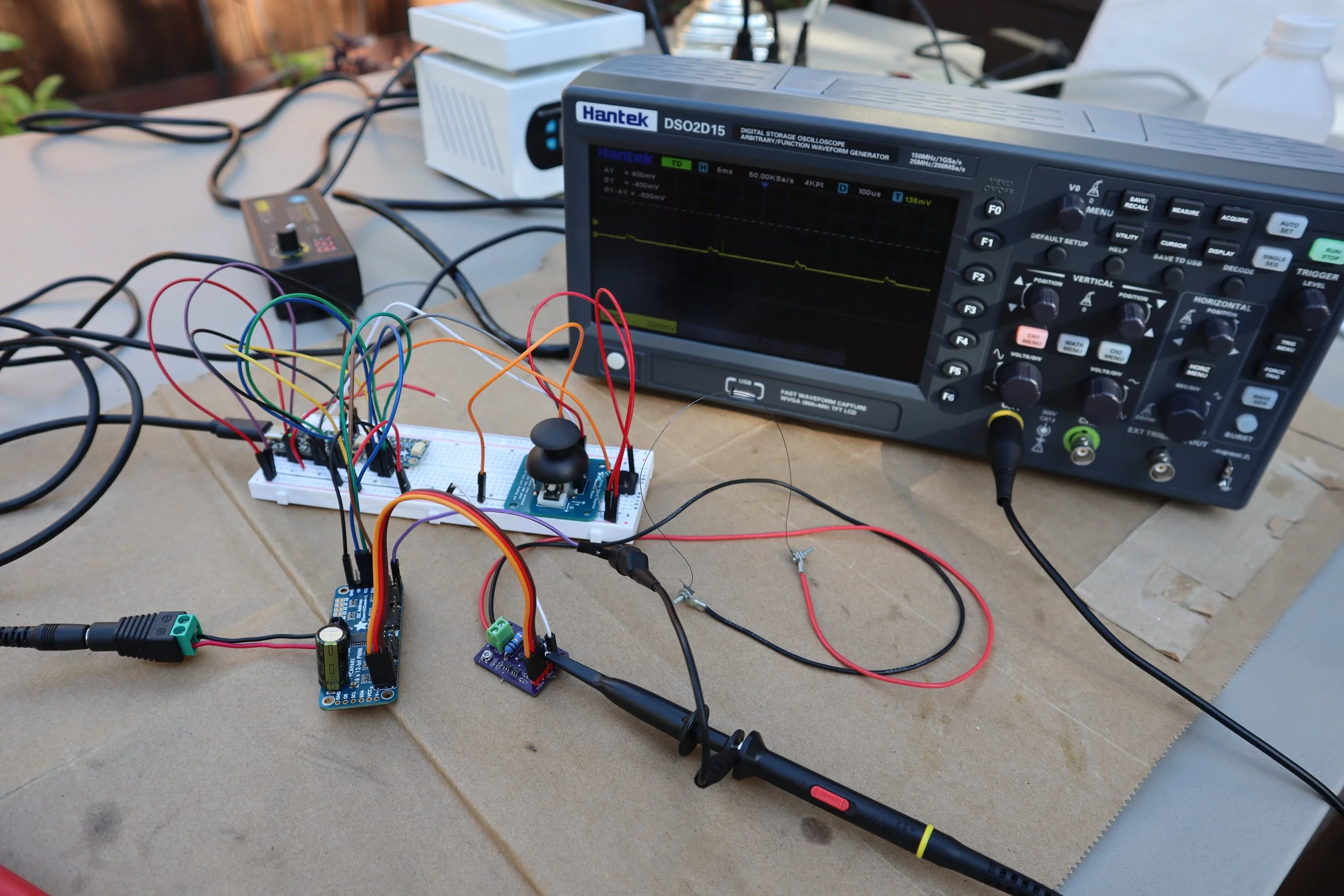
![PCB v2.2 Test]()
PCB v2.2 Test
I’m troubleshooting the latest iteration of my PCB prototype, since the position feedback signal is experiencing interference from the PWM input. I think the high current passing through the nitinol circuit creates a voltage differential between the PCB and microcontroller ground planes, since I can measure the correct signal when referencing the PCB ground plane. The current PCB v2.2 is approaching a finished product, as demonstrated in the video below.


Here's an example of manually positioning a small cardboard “point” via joystick using four nitinol wires, one in each cardinal direction.
… And here’s an example of the position feedback signal for a single wire. The PWM duty cycle still interferes with the position signal due to a ground voltage difference between the driver PCB and microcontroller (which supplies the PWM and reference voltage for the position feedback signal), but with an amplitude of only ~30mV. As I eliminate this ground voltage difference, the position signal will be fully decoupled from the PWM signal. At the moment, it’s still possible to take consistent measurements provided the position feedback signal is always sampled during the “low state” of the PWM signal. When nitinol wires are used in opposing pairs, one wire can be used to actively pull while the other passive wire is used to measure position.

Fig 3. An early concept involved an outer socket holding the eyeball, with wires pulling from inside. There was too much friction for this to be practical.
Iteratively prototyping the eyeball mechanism
I’ve been developing the mechanism for my animatronic eyeball synchronously with the nitinol control PCB so that updates and improvements to either component inform design choices for the other.
Many existing designs for animatronic eyeballs are available online, but all of them use servo motors for actuation. I want to see if I can come up with a mechanism specially suited to nitinol actuation, which means there are several interesting design constraints.
The small range of motion of nitinol wire requires mechanical amplification through levers or something similar.
Nitinol wire can contract itself under power but must be stretched back out with some external force. It will not stay contracted under tension once power is shut off. To save energy, the eyeball mechanism must be able to hold a position without active control by the nitinol.
I’ve used 3D printing to rapidly prototype my design ideas. This has been an invaluable tool, but it has also presented some design constraints based on the material properties of 3D-printed parts. Primarily, the roughness of 3D-printed surfaces has made friction a large factor in my designs.
You can see the progression of my mechanism design below:
Developing the eyeball mechanism
-
![First Design Concept]()
First Design Concept
This design concept was heavily inspired by existing mechanisms available on the internet, such as Will Cogley's 3D-printed animatronic eye assembly. I quickly realized that this mechanism is better suited to rigid linkages and servo motors than flexible nitinol actuators. Reflecting this, I decided to pursue concepts that better account for nitinol's advantages and disadvantages.
-
![Second Design Concept]()
Second Design Concept
My second design concept for the eyeball mechanism consisted of a hollow eyeball encased in a socket. The nitinol wires attached to a smaller sphere within the eyeball, magnifying the wires’ relatively small range of motion. The idea was to exploit the simplicity of nitinol as an actuator by minimizing linkages or other moving parts.
-
![Iterative Prototyping]()
Iterative Prototyping
Upon testing my initial design solution, it became clear that the biggest drawback was friction between the 3D-printed parts. After iterating through a dozen or so prototypes - varying tolerances, surface finishes, and lubrication methods - with little success, I decided to return to the ideation process.
-
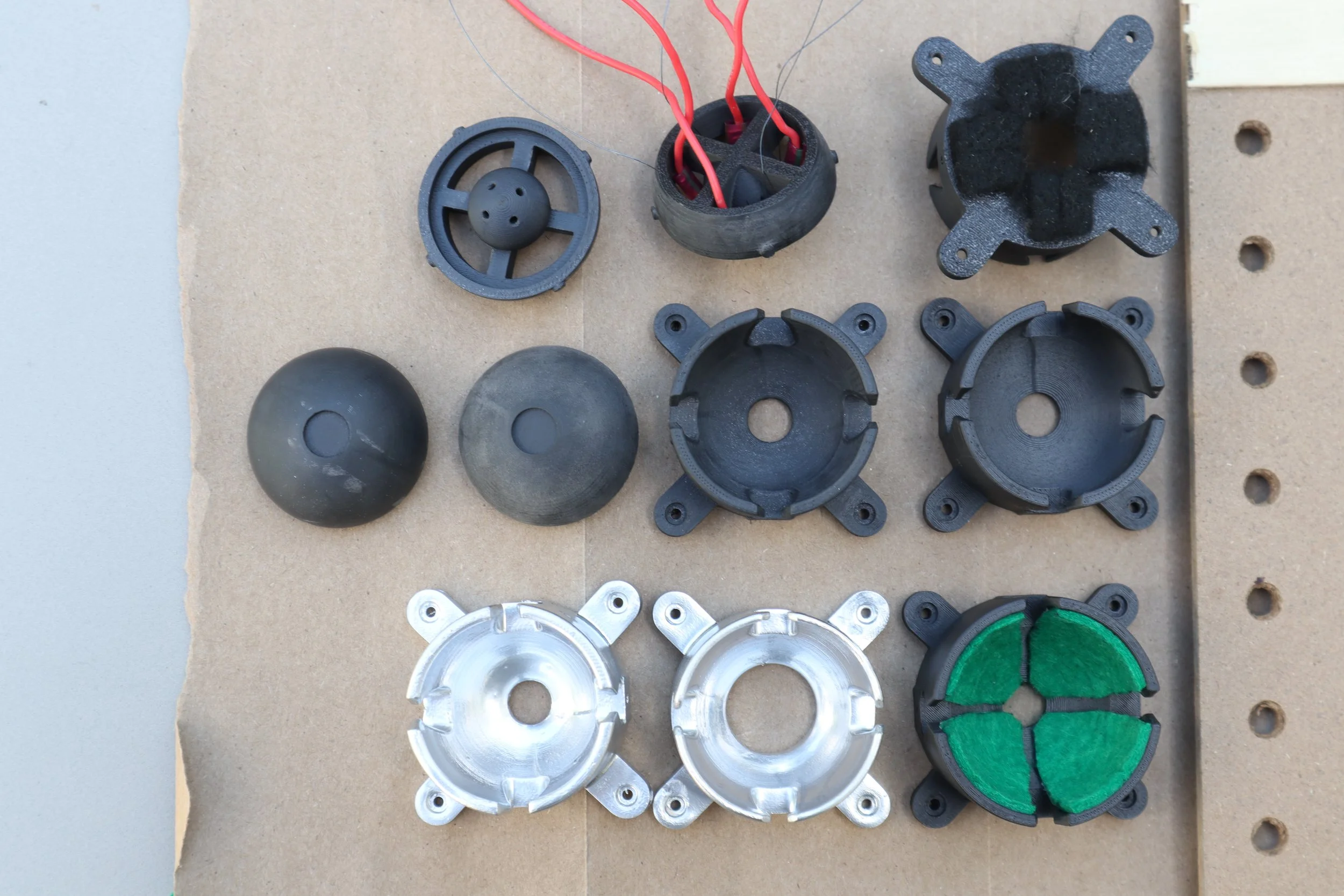
![Ideation Process (1/5)]()
Ideation Process (1/5)
After returning to the drawing board, I brainstormed as many novel joint concepts as I could, even if I wasn't sure they would work. I made rough initial prototypes for a few, including this one that uses four cords in tension.
-
![Ideation Process (2/5)]()
Ideation Process (2/5)
This concept uses a much smaller internal ball joint - the idea was that the much smaller surface area would reduce friction considerably, but the design was also (predictably) much too weak and easily broken.
-
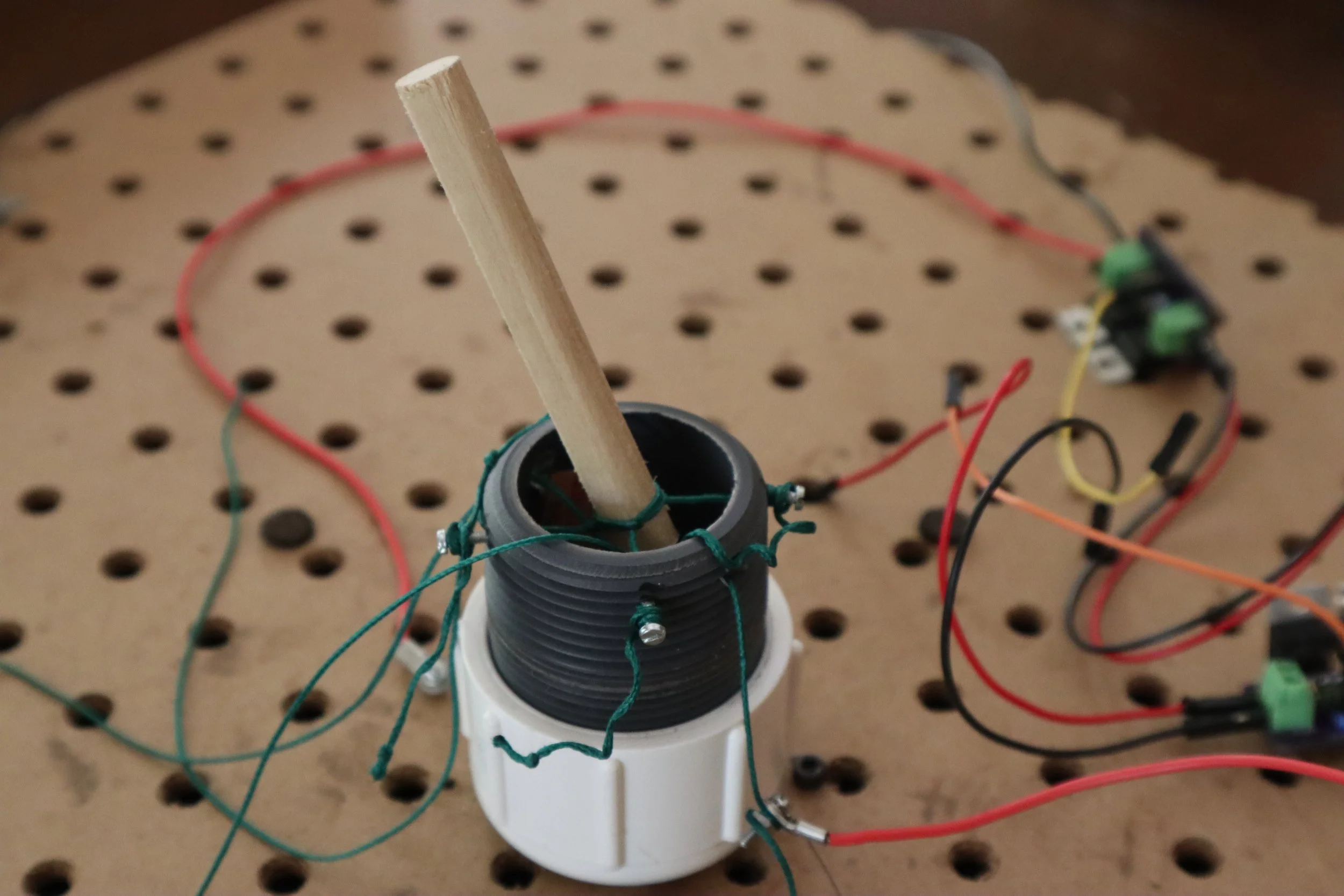
![Ideation Process (3/5)]()
Ideation Process (3/5)
This concept uses a cord in tension, running axially through the cross-shaped rocker that holds the eyeball. A knot in the center of the cord kept the rocker in place. Instead of friction, maintaining tension in the cord became the driving issue with this design. Plus, it was really hard to assemble.
-
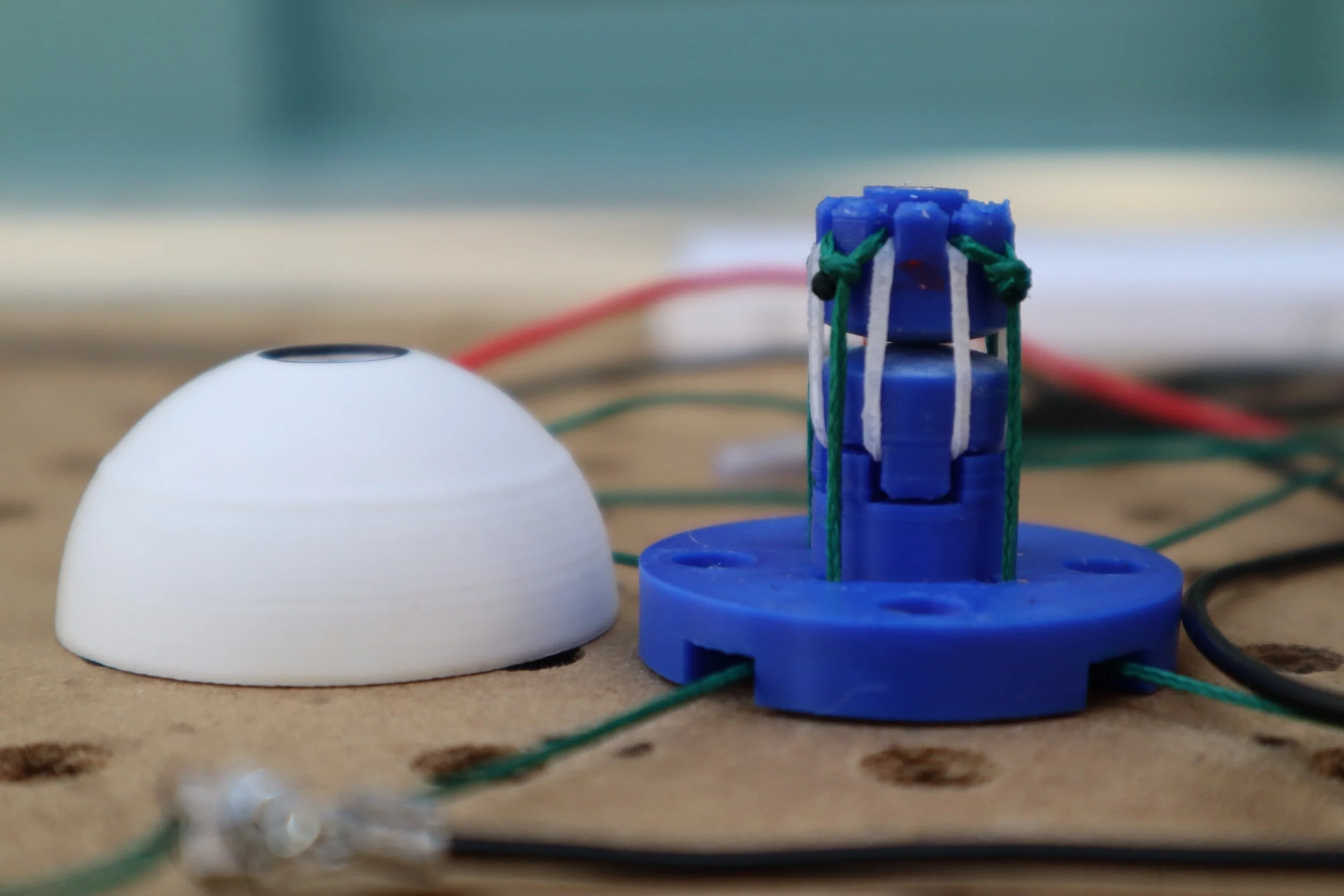
![Ideation Process (4/5)]()
Ideation Process (4/5)
This version uses a pseudo-ball joint inspired by the mechanism inside a joystick. I was struck by how similar the motion of a joystick is to the desired motion of an animatronic eye. This solution was reliable and easy to assemble, making it a top contender. I continued tinkering with similar solutions to see whether I could improve it.
-
![Ideation Process (5/5)]()
Ideation Process (5/5)
This steel-bead ball joint was the easiest to print and assemble. Plus, it had a smooth, consistent motion across its full range. It just had one drawback - I couldn’t find a good way to attach the wires such that the small range of actuation was converted to a large range of motion.
-
![Third Round Mechanism (Current)]()
Third Round Mechanism (Current)
After much ideation and prototyping, I finally settled on a winning design. This mechanism uses a rolling contact joint to leverage surface friction into a design feature rather than a constraint. In addition, it has a good range of motion, is easy to print and assemble, and has a geometry that enables straightforward wire attachment.






The next prototype for this eye mechanism will focus on developing a compact base to reduce the footprint needed for the nitinol wires. I’m also continuing to tinker with ways to attach the nitinol wire to the mechanism so that it’s easy to adjust.